Camera Surveillance System with OpenCV

This Project is going to use PyQt6 to build a Desktop app connected to an OpenCV backend to process an INSTAR IP camera RTSP livestream and perform an Object Detection:
pip install pyqt6 pyqt6-tools opencv-python
You should now be able to start the Qt Designer by typing designer:
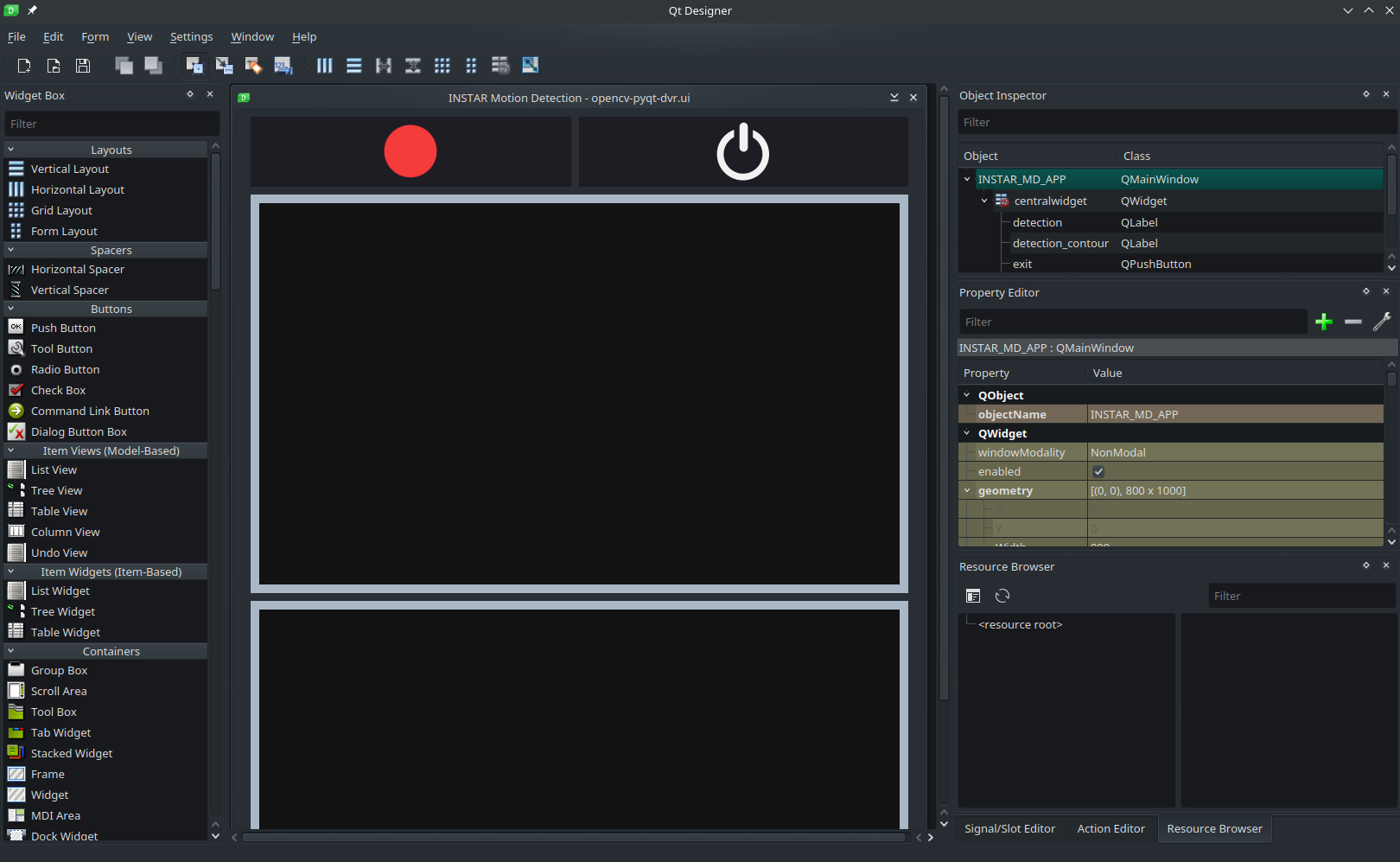
Buidling the User Interface
You can load the UI file and edit the user interface according to your needs:
Backend Code
In the previous step we generated an XML file with the ending .ui. We can now write a Python script that will start a Qt window application using this definition file:
from PyQt6.QtCore import *
from PyQt6.QtGui import *
from PyQt6.QtWidgets import *
from PyQt6.uic import loadUiType
import sys
# load ui definition from Qt designer
ui, _ = loadUiType('opencv-pyqt-dvr.ui')
# initialize application
class DvrDashboard(QMainWindow, ui):
def __init__(self):
QMainWindow.__init__(self)
self.setupUi(self)
# execute the Qt window
def main():
app = QApplication(sys.argv)
window = DvrDashboard()
window.show()
app.exec()
# start
if __name__ == '__main__':
main()
Handling UI Interactions
Next we need to provide functions that catch button presses inside the Qt application window and execute some code in our backend:
# initialize application
class DvrDashboard(QMainWindow, ui):
def __init__(self):
QMainWindow.__init__(self)
self.setupUi(self)
# handle clicks on button "monitoring"
self.monitoring.clicked.connect(self.get_livestream)
# handle clicks on button "exit"
self.exit.clicked.connect(self.close_window)
def get_livestream(self):
print("INFO :: Connecting to IP Camera")
def close_window(self):
print("WARNING :: Application shutdown")
Getting the Livevideo
I will use an INSTAR IP camera's RTSP Stream to feed OpenCV a live video:
def get_livestream(self):
print("INFO :: Connecting to IP Camera")
cap = cv2.VideoCapture(RTSP_URL, cv2.CAP_FFMPEG)
if not cap.isOpened():
print('ERROR :: Cannot open RTSP stream')
exit(-1)
while True:
success, img = cap.read()
cv2.imshow(RTSP_URL, img)
if cv2.waitKey(1) == 27: # Keep running until you press `esc`
break
cap.release()
cv2.destroyAllWindows()
Motion Detection
For motion detection we can take a second still frame from our camera and compare it to the first one. As long as they both match no motion happened between both captures:
while True:
# get frame from livestream
success, img = cap.read()
# get second frame for motion detection
_, val_img = cap.read()
# get absolute difference between both frames
delta = cv2.absdiff(img, val_img)
# find contours in delta for moving object location
grayscale = cv2.cvtColor(delta, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(grayscale, (5,5), 0)
canny = cv2.Canny(blur, 35, 75)
dilated = cv2.dilate(canny, None, iterations=3)
contours, _ = cv2.findContours(dilated, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for ctr in contours:
# filter small objects
if cv2.contourArea(ctr) < 5000:
continue
# get bounding box location
x,y,w,h = cv2.boundingRect(ctr)
# draw bounding box around object
cv2.rectangle(img, (x,y), (x+w, y+h), (204,119,0), 2)
# get canny image
cv2.imwrite('detection_object_contour.jpg', canny)
# get marked image
cv2.imwrite('detection_bounding_box.jpg', img)
# display detection contour in frontend
detection_contour = QImage('detection_object_contour.jpg')
detection_contour_map = QPixmap.fromImage(detection_contour)
self.detection_contour.setPixmap(detection_contour_map)
# display detection bounding box in frontend
detection_image = QImage('detection_bounding_box.jpg')
detection_image_map = QPixmap.fromImage(detection_image)
self.detection.setPixmap(detection_image_map)
# also show live video for reference
cv2.imshow(RTSP_URL, img)
if cv2.waitKey(1) == 27: # Keep running until you press `esc`
break
cap.release()
cv2.destroyAllWindows()