Using Tensorflow Models in OpenCV
import cv2 as cv
import json
import matplotlib.pyplot as plt
import numpy as np
import random
Model
!cd model && wget http://download.tensorflow.org/models/object_detection/mask_rcnn_inception_v2_coco_2018_01_28.tar.gz
!cd model && tar zxvf mask_rcnn_inception_v2_coco_2018_01_28.tar.gz
!cd model && wget https://github.com/vjgpt/Object-Detection/raw/master/mask_rcnn_inception_v2_coco_2018_01_28.pbtxt
!cd model && wget https://github.com/vjgpt/Object-Detection/blob/master/mscoco_labels.names
# model configuration and weights
cfg_path = './model/mask_rcnn_inception_v2_coco_2018_01_28.pbtxt'
weight_path = './model/mask_rcnn_inception_v2_coco_2018_01_28/frozen_inference_graph.pb'
classes_path = './model/mscoco_labels.names'
with open(classes_path) as json_data:
data = json.load(json_data)
print(data['payload']['blob']['rawLines'])
['person\r', 'bicycle\r', 'car\r', 'motorcycle\r', 'airplane\r', 'bus\r', 'train\r', 'truck\r', 'boat\r', 'traffic light\r', 'fire hydrant\r', '\r', 'stop sign\r', 'parking meter\r', 'bench\r', 'bird\r', 'cat\r', 'dog\r', 'horse\r', 'sheep\r', 'cow\r', 'elephant\r', 'bear\r', 'zebra\r', 'giraffe\r', '\r', 'backpack\r', 'umbrella\r', '\r', '\r', 'handbag\r', 'tie\r', 'suitcase\r', 'frisbee\r', 'skis\r', 'snowboard\r', 'sports ball\r', 'kite\r', 'baseball bat\r', 'baseball glove\r', 'skateboard\r', 'surfboard\r', 'tennis racket\r', 'bottle\r', '\r', 'wine glass\r', 'cup\r', 'fork\r', 'knife\r', 'spoon\r', 'bowl\r', 'banana\r', 'apple\r', 'sandwich\r', 'orange\r', 'broccoli\r', 'carrot\r', 'hot dog\r', 'pizza\r', 'donut\r', 'cake\r', 'chair\r', 'couch\r', 'potted plant\r', 'bed\r', '\r', 'dining table\r', '\r', '\r', 'toilet\r', '\r', 'tv\r', 'laptop\r', 'mouse\r', 'remote\r', 'keyboard\r', 'cell phone\r', 'microwave\r', 'oven\r', 'toaster\r', 'sink\r', 'refrigerator\r', '\r', 'book\r', 'clock\r', 'vase\r', 'scissors\r', 'teddy bear\r', 'hair drier\r', 'toothbrush']
class_names = data['payload']['blob']['rawLines']
len(class_names)
90
model = cv.dnn.readNetFromTensorflow(weight_path, cfg_path)
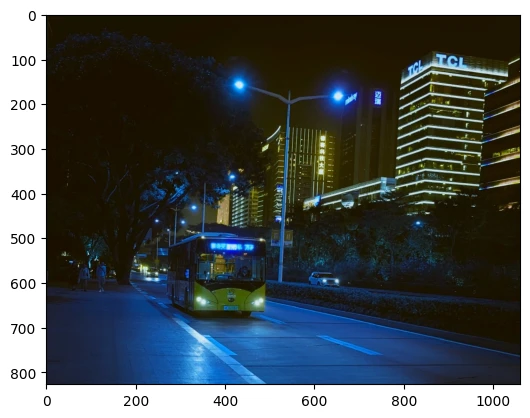
Preprocessing
# load test image
img_path = './assets/bus.jpg'
img = cv.imread(img_path)
height, width, channels = img.shape
plt.imshow(img)
blob = cv.dnn.blobFromImage(img)
Model Predictions
def get_predictions(model, blob):
model.setInput(blob)
boxes, masks = model.forward(['detection_out_final', 'detection_masks'])
return boxes, masks
boxes, masks = get_predictions(model, blob)
print(len(boxes), len(masks))
Prediction Visualization
print(height, width, channels)
canvas = np.zeros((height, width, channels))
for j in range(len(masks)):
bbox = boxes[0, 0 , j]
mask = masks[j]
print(bbox)
class_id = bbox[1]
score = bbox[2]
# filter 100 detections by adding a detection confidence threshold
threshold = 0.5
# generate random colours for each class
colours = [(random.randint(0,255), random.randint(0,255), random.randint(0,255)) for j in range(len(class_names))]
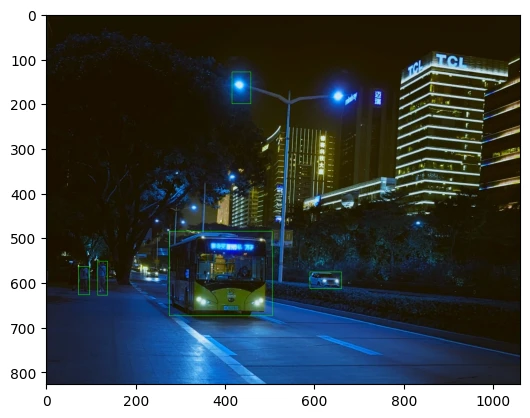
Bounding Boxes
for j in range(len(masks)):
bbox = boxes[0, 0 , j]
mask = masks[j]
class_label = bbox[1]
score = bbox[2]
if score > threshold:
# debug
print(class_label)
print(score)
print(mask.shape)
print(bbox.shape)
# bbox corner positions in relative/normalized coordinates * img dimensions as int = pixel position
x1, y1, x2, y2 = int(bbox[3] * width), int(bbox[4] * height), int(bbox[5] * width), int(bbox[6] * height)
output = cv.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0))
plt.imshow(output)
# only keep mask for detected class label
mask = mask[int(class_label)]
# debug output e.g.
# 2.0 => class label
# 0.9532703 => prediction confidence
# (90, 15, 15) => mask consists of 90 (1 for each class the model was trained with) 15(*image width)x15(*image height) squares
# (7,) => bounding box is drawn with 7 corner points
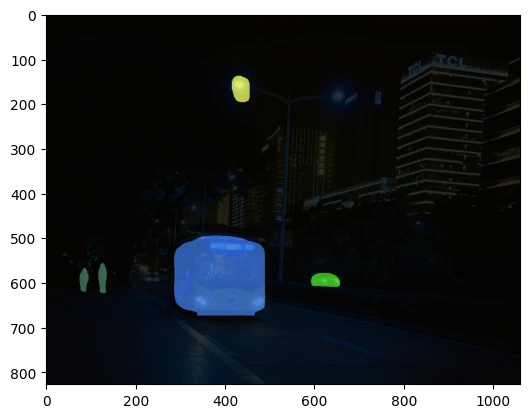
Segmentation Masks
for j in range(len(masks)):
bbox = boxes[0, 0 , j]
score = bbox[2]
if score > threshold:
class_label = bbox[1]
mask = masks[j]
# bbox corner positions in relative/normalized coordinates * img dimensions as int = pixel position
x1, y1, x2, y2 = int(bbox[3] * width), int(bbox[4] * height), int(bbox[5] * width), int(bbox[6] * height)
# only keep mask for detected class label
mask = mask[int(class_label)]
# de-normalize mask
mask = cv.resize(mask, (x2-x1, y2-y1))
# debug
# print(mask.shape)
_, mask = cv.threshold(mask, 0.5, 1, cv.THRESH_BINARY)
for c in range (channels):
# multiply by 255 to get white masks for all classes
canvas[y1:y2, x1:x2, c] = mask * colours[int(class_label)][c]
plt.imshow(canvas)

overlay = ((0.8 * canvas) + (0.2 * img)).astype('uint8')
plt.imshow(overlay)